One of our lab containing about 400 square meters of space.
One of our lab containing about 200 square meters of space.
A light-weight, compact indoor mobile robot with an omnidirectional drive system and with native ROS and Gazebo integration. (link)
A force-sensing robotic system that provides researchers with easy-to-use robotic functionalities and grants them low-level access to robot control and learning capabilities. (link)
A small, fast, entry-level field robotics research platform with an onboard computer, GPS and IMU fully integrated with ROS. (link)
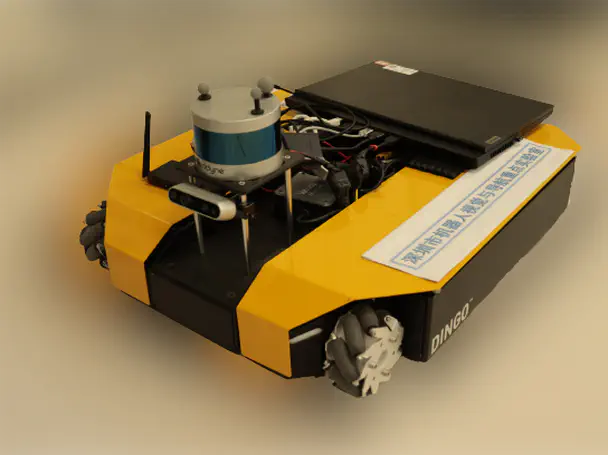
A midsize indoor robot platform that uses an omni-drive, it support native ROS and Gazebo integration. (link)
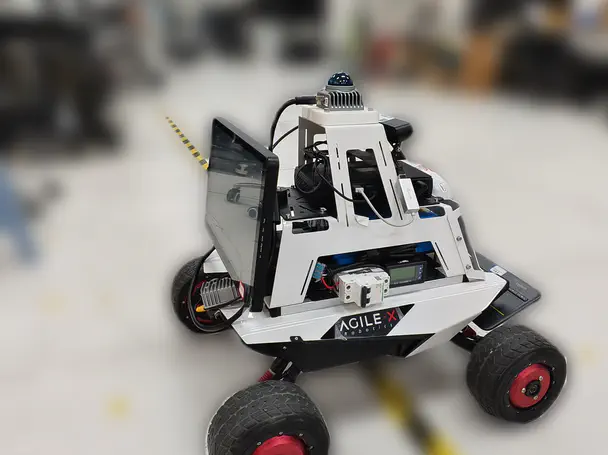
A high-speed, all-terrain Mini UGV (Unmanned Ground Vehicle), designed specifically for cutting-edge scientific experiments, serving as a versatile mobile research platform. (link)
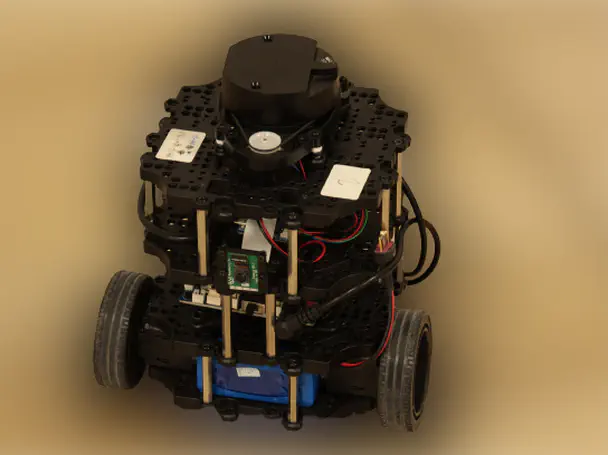
A small, affordable, programmable, ROS-based mobile robot for use in education, research, hobby, and product prototyping. (link)
A lightweight, mass-produced bionic quadruped robot with Intelligent Side-Follow System (ISS), Super Sensory System (SSS) and built-in powerful AI. (link)
A customized multi-sensor handheld device (LiDAR, Camera, and IMU) that is designed to collect data and deploy research algorithms for real-time localization and mapping.
A portable 3D laser scanning device with high precision and efficiency, suitable for data acquisition and analysis in a variety of complex environments. (link)
A system that uses 13 high-precision cameras to track the movement of people or objects. (link)
A 3D depth-sensing camera that uses structured light and stereo imaging to capture a detailed 3D point cloud of the environment. (link)
A 3D depth-sensing camera that uses LIDAR technology to capture a detailed 3D point cloud of the environment. (link)
Used for model training. Performance Reference (link)
A floor-standing large screen with a system that supports touch screen interaction and is often used for meetings or presentations. (link)