Li He
Research Associate Professor
Biography
Dr. Li He is currently a Research Associate Professor in the Department of Electronic and Electrical Engineering at Southern University of Science and Technology (SUSTech). Prior to joining SUSTech, he was an Associate Professor in the School of Electromechanical Engineering, Guangdong University of Technology. He is a recipient of the Pearl River Talent Recruitment Program of Guangdong, and Shenzhen Peacock Plan (Type C). He is an Associate Editor/ Guest Managing Editor of Computers & Electrical Engineering, and an Associate Editor of IEEE Access. He served as a committee member for ICRA, ROBIO and WRC SARA. Dr. He has more than 30 publications on high-rank venues such as TIP, TCYB, PR, IROS and ICRA. He has individually chaired more than 6 grants of over 3 million RMB, including 2 National Grants. Dr. He’s research interests include machine learning, computer vision, large-scale data clustering, LiDAR navigation and SLAM.
Education
2008-2014, Ph.D., Dept. of Automation, Northwestern Polytechnical University, China
2010-2011, Joint Ph.D., Dept. of Computing Science, University of Alberta, Canada
2006-2009, M.S., Dept. of Automation, Northwestern Polytechnical University, China
2002-2006, B.S., Dept. of Automation, Northwestern Polytechnical University, China
Internship Experience
2021-present, Research Associate Professor, Dept. of Electrical and Electronic Engineering, Southern University of Science and Technology, China
2018-2021, Associate Professor, School of Electromechanical Engineering, Guangdong University of Technology, China
2017-2018, Assistant Professor, School of Electromechanical Engineering, Guangdong University of Technology, China
2014-2017, Postdoctoral Fellow, Dept. of Computing Science, University of Alberta, Canada
Research
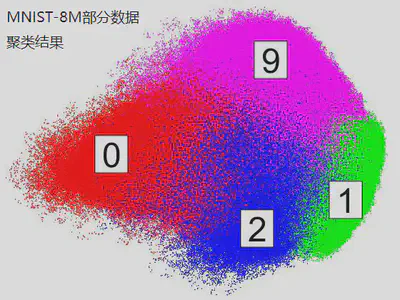
Large-scale Data Analysis. Dr. He has worked on kernel approximation and large-scale data spectral analysis for more than ten years, and proposed several works such as parallel-computing for spectral clustering (2016, Pattern Recognition), error analysis (2017,Neurocomputing), optimal sampling (2018,IEEE Trans. on Image Processing), fast spectral clustering (2019, IEEE Trans. on Cybernetics), doubly stochastic clustering (2023, IEEE Trans. on Circuits and Systems for Video Technology), Sinkorn/Wassertein distance acceleration (2024, IEEE Trans. on Consumer Electronics), Nystrom acceleration (to appear, IEEE Trans. on Big Data) and applications (2017-2025) on robot computer vision and LiDAR analysis. Dr. He chaired two national grants, young and general programs, respectively, on this field.
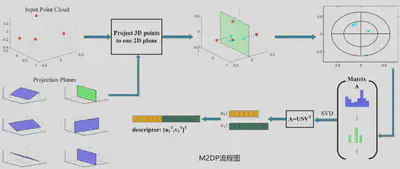
Vision and/or LiDAR SLAM: In IROS 2016, Dr. He proposed M2DP, a global point cloud descriptor for loop closure detection. This work was one of the start-up works in LiDAR applications for mobile robot and auto-driving, and is one of the most cited works in LiDAR loop closure detection. He has many works on loop closure detection and LiDAR+Visual SLAM since then, including TIV, TASE, RAL, TMech, Robotica, ICRA and IROS. Considering Dr. He’s contributions on SLAM, He was appointed as the recipient of The Pearl River Talent Recruitment Program of Guangdong.
Honor
- Second Prize, National LiDAR Conference Point Cloud Intelligent Analysis Competition, 2025
- Outstanding Winner, Satellite Navigation and Positioning Science and Technology Award, 2024
- Second Prize, Civil Aviation Science and Technology Award, 2024
- Second Prize, Invention Entrepreneurship Innovation Award, 2022
- Recipient of The Pearl River Talent Recruitment Program of Guangdong, China, 2019
- Shenzhen Peacock Plan (Type C), China, 2021
- Member of Innovative and Enterprising Team under The Sailing Program of Guangdong, China, 2017
Publications
Large-scale Data Clustering
- Li He, and Hong Zhang. Two-Step Nystrom Sampling for Large-scale Kernel Approximation. IEEE Transactions on Big Data, to appear.
- Li He, Hong Zhang. Large-scale Graph Sinkhorn Distance Approximation for Resource-constrained Devices. IEEE Transactions on Consumer Electronics, vol. 70, no. 1, pp. 2960-2969, Feb. 2024.
- Yirui Yang, Xubin Lin, Li He, Yisheng Guan, Hong Zhang. Factorized Embedding Graph Matching Network for Learning Lawler’s Quadratic Assignment Problem, ICIP 2024.
- Li He, Hong Zhang. Doubly Stochastic Distance Clustering. IEEE Transactions on Circuits and Systems for Video Technology, vol. 33, no. 11, pp. 6721-6732, Nov. 2023.
- Li He, Nilanjan Ray, Yisheng Guan and Hong Zhang. Fast Large-Scale Spectral Clustering via Explicit Feature Mapping. IEEE Transactions on Cybernetics, Vol. 49, Issue 3, March 2019, pp. 1058-1071.
- Li He and Hong Zhang. Kernel K-means Sampling for Nystrom Approximation. IEEE Transactions on Image Processing, Volume 27, Issue 5, May 2018, pp. 2108-2120.
- Li He, Nilanjan Ray and Hong Zhang. Error Bound of Nystrom-approximated NCut Eigenvectors and Its Application to Training Size Selection. Neurocomputing, 2017, Vol. 239, May: 130-142.
- Li He and Hong Zhang. Iterative Ensemble Normalized Cuts. Pattern Recognition, 2016, Vol. 52, April: 274-286.
SLAM
- Li He, Xiaolong Wang, and Hong Zhang. M2DP: A novel 3D point cloud descriptor and its application in loop closure detection. In Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on, pp. 231-237. IEEE, 2016. (Second Highest Citation in Its Topic)
- Li He, Wen Li, Yisheng Guan, and Hong Zhang. IGICP: Intensity and Geometry Enhanced LiDAR Odometry. IEEE Transactions on Intelligent Vehicles, vol. 9, no. 1, pp. 541-554, Jan. 2024.
- X. Lin, S. Ji, Z. Liao, L. He, X. Zhou and H. Zhang. PMO-SLAM: Enhancing Incremental Optimization With Probabilistic Metrics for Object SLAM. IEEE/ASME Transactions on Mechatronics, to appear.
- Huaqi Tao, Bingxi Liu, Calvin Chen, Tingjun Huang, He Li, Jinqiang Cui, Hong Zhang. TextInPlace: Indoor Visual Place Recognition in Repetitive Structures with Scene Text Spotting and Verification, IROS 2025.
- Zhixin Zhang, Xiaoqiang Zhang, Xiaoxia Li, Zhiyuan Chang, Li He. Refractive Scene Camera Pose Estimation via Inverting Underwater Neural Radiance Fields, IEEE ROBIO 2025 (Finalist of Best Paper in AI in Robotics)
- Xubin Lin, Jiahao Ruan, Yirui Yang, Li He, Yisheng Guan, Hong Zhang. Robust Data Association Against Detection Deficiency for Semantic SLAM. IEEE Transactions on Automation Science and Engineering, vol. 21, no. 1, pp. 868-880, Jan. 2024.
- Hanjing Ye, Jieting Zhao, Yu Zhan, Weinan Chen, Li He, Hong Zhang. Person Re-Identification for Robot Person Following with Online Continual Learning. IEEE Robotics and Automation Letters, vol. 9, no. 11, pp. 9151-9158, Nov. 2024.
- Guangcheng Chen, Yicheng He, Li He, Hong Zhang. PISR: Polarimetric Neural Implicit Surface Reconstruction for Textureless and Specular Objects, ECCV 2024.
- Zhenchao Lin, Li He*, Hongqiang Yang, Xiaoqun Sun, Guojin Zhang, Weinan Chen, Yisheng Guan and Hong Zhang. SWCF-Net: Similarity-weighted Convolution and Local-global Fusion for Efficient Large-scale Point Cloud Semantic Segmentation, IROS 2024
- Qingmao Wei, Bi Zeng, Jianqi Liu, Li He, Guotian Zeng. LiteTrack: Layer Pruning with Asynchronous Feature Extraction for Lightweight and Efficient Visual Tracking, ICRA 2024
- Yaling Pan, Li He, Yisheng Guan, Hong Zhang. HP-KPConv: Point Cloud Registration Evaluation via Local Feature Distribution Similarity, ROBIO 2024 (Best Paper Award in Robot Learning / Finalist of Best Conference Paper)
- Hanjing Ye, Weinan Chen, Jingwen Yu, Li He, Yisheng Guan, Hong Zhang. Condition-Invariant and Compact Visual Place Description by Convolutional Autoencoder. Robotica, 41(6), pp. 1718-1732, Jun. 2023.
- Jiahao Ruan, Li He, Yisheng Guan, Hong Zhang. Combining Scene Coordinate Regression and Absolute Pose Regression for Visual Relocalization, ICRA 2023.
- Hanjing Ye, Jieting Zhao, Yaling Pan, Weinan Chen, Li He and Hong Zhang. Robot Person Following Under Partial Occlusion, ICRA 2023.
- Weinan Chen, Lei Zhu, Xubin Lin, Yisheng Guan, Li He and Hong Zhang. Dynamic Strategy of Keyframe Selection with PD Controller for VSLAM Systems. IEEE/ASME Transactions on Mechatronics, vol. 27, no. 1, pp. 115-125, Feb. 2022.
- Lei Zhu, Weinan Chen, Xubin Lin, Li He, and Yisheng Guan. Curvature-Variation- Inspired Sampling for Point Cloud Classification and Segmentation. IEEE Signal Processing Letters, vol. 29, pp. 1868-1872, Aug. 2022.
- Guangcheng Chen, Li He, Yisheng Guan, Hong Zhang. Perspective Phase Angle Model for Polarimetric 3D Reconstruction. ECCV 2022.
- Ruihao Zhou, Li He, Hong Zhang, Xubin Lin, Yisheng Guan. NDD: A Normal Distribution Based 3D Point Cloud Descriptor for Loop Closure Detection. IROS 2022.
- Weinan Chen, Lei Zhu, Chaoqun Wang, Li He and Max Q.-H. Meng. CEB-Map: Visual Localization Error Prediction for Safe Navigation. IEEE Sensors Journal, vol. 21, no. 10, pp. 11769-11780, 15 May15, 2021.
- Wen JM, He L* and Zhu FM. Swarm Robotics Control and Communications: Imminent Challenges for Next Generation Smart Logistics. IEEE Communications Magazine, 2018, 56(7): 102-107.
- Xubin Lin, Yirui Yang, Li He, Weinan Chen, Yisheng Guan, Hong Zhang. Robust Improvement in 3D Object Landmark Inference for Semantic Mapping. ICRA 2021.
- Zhuang Dai, Xinghong Huang, Weinan Chen, Chuangbing Chen, Li He, Shuhuan Wen and Hong Zhang. Keypoint Description by Descriptor Fusion Using Autoencoders. ICRA 2020.
- Zhuang Dai, Xinghong Huang, Weinan Chen, Li He and Hong Zhang. A Comparison of CNN-Based and Hand-Crafted Keypoint Descriptors. ICRA 2019.
- Xinghong Huang, Zhuang Dai, Weinan Chen, Li He and Hong Zhang. Improving Keypoint Matching Using a Landmark-Based Image Representation. ICRA 2019.
- X. Lin, W. Chen, Li He, et al. Improving Robustness of Monocular VT&R System with Multiple Hypothesis, ROBIO 2017. (Finalist of T. J. Tarn Best Paper)